接触模拟的一般目的:确定表面上发生接触的面积、计算产生的接触压力
接触条件:一类特殊的不连续约束(只有当两个表面接触时才会有约束产生),允许力从模型的一部分传递到另一部分
ABAQUS接触功能概述
在ABAQUS/Standard和ABAQUS/Explicit中的接触模拟功能具有明显的差异。
ABAQUS/Standard:基于表面(surface)或者基于接触单元(contact element),因此,必须在模型的各个部件上创建可能发生接触的表面;然后,必须判断哪一对表面可能发生彼此接触,称之为接触对;最后,必须定义控制各接触面之间相互作用的本构模型,包括诸如摩擦行为等。
ABAQUS/Explicit:可以利用通用(“自动”)接触算法或者接触对算法。通常定义一个接触模拟只需简单地指定所采用的接触算法和将会发生接触作用的表面。在某些情况下,当默认的接触设置不满足需要时,可以指定接触模拟的其他方面内容,如考虑摩擦的相互作用力学模型。
定义接触面
表面是由其下层材料的单元面来创建的。
实体单元上的接触面
对于二维和三维的实体单元,可以通过在视区中选择部件实体的区域来指定不见中接触表面的部分。
在结构、面和刚体单元上的表面
单侧(single-sided)表面:应用时必须指明是单元的哪个面来形成接触面
双侧(double-sided)表面:仅在ABAQUS/Explicit中可以用,更为常用。自动包含两个面和所有自由边界,接触既可以发生在构成双侧接触单元的面上,也可以发生在单元的边界上。
基于边界(edge-based)的表面:考虑在模型周围边界上发生接触。例如:可以用来模拟在壳边界上的接触。
基于节点(node-based)的表面:定义了在节点集和表面之间的接触,可以应用并取得与机遇边界的表面同样的效果。
刚性表面
刚性体的表面,可以定义为一个解析形状,或者是基于与刚体相关的单元的表面。
解析刚性体表面的三种基本形式:在二维中:一个二维的分段刚性表面,可以在二维平面上应用直线、圆弧和抛物线弧定义表面的横截面;在三维中:在用户指定的平面上应用对于二维问题相同的方式定义,然后由这个横截面绕一个轴扫掠形成一个旋转面,或沿一个矢量拉伸形成一个场的三维表面。
优点:只用少量的几何点便可以定义、计算效率很高
缺点:在三维情况下,能够创建的形状范围有限
离散形式的刚性表面:基于构成刚性体的单元面,可以创建比解析刚性表面几何上更为复杂的刚性面,定义方法与定义可变形体表面的方法完全相同。
在ABAQUS/Explicit中,解析刚性表面只能应用于接触对算法。
接触面间的相互作用
接触面间的相互作用包含两部分:接触面间的法向作用、接触面间的切向作用。切向作用包括:接触面间的相对运动(滑动)、可能存在的摩擦剪应力。ABAQUS中接触相互作用的默认模型:没有粘结的无摩擦模型
接触面的法向行为
间隙(clearance):两个表面分开的距离。
当两个表面间的间隙为零时,在ABAQUS中施加了接触约束。在接触问题的公式中,对接触面之间能够传递的接触压力的量值未作任何限制。当接触面之间的接触压力变为零或负值时,两个接触面分离,并且约束被移开。这种行为代表了“硬”接触。
当接触条件从“开”(间隙值为正)到“闭”(间隙值为零)时,接触压力会发生剧烈的变化,有时可能会使得在ABAQUS/Standard中的接触模拟难以完成。但在ABAQUS/Explicit中不会这样,因为其显式算法不需要迭代。
表面的滑动
计算两个表面之间的相互滑动可能是一个非常复杂的计算,因此ABAQUS在分析时,对哪些滑动的量级是小的和哪些滑动的量级可能是有限的问题作了区分。对于在接触面之间是小滑动的模型问题,其计算成本很小。通常很难定义什么是“小滑动”,可以遵循的一般原则:对于一点与一个表面接触的问题,只要该点的滑动量不超过一个单元典型尺度的一小部分,可以近似地应用“小滑动”。
摩擦模型
库伦摩擦(Coulomb friction):经常用来描述接触面之间相互作用的摩擦模型,应用摩擦系数$\mu$来表征两个表面之间的摩擦行为。
默认的摩擦系数为零。在表面拽力达到一个临界剪应力值之前,切向运动一直保持为零。接触表面的临界摩擦剪应力取决于法向接触压力:
$$\tau _{crit}=\mu p$$ 如果两个接触表面是基于单元的表面,也可以指定摩擦应力极限。
在ABAQUS/Standard的模拟中,在粘结(剪应力小于$\mu p$)和滑移两种状态之间的不连续性可能导致收敛问题。因此,只有当摩擦力对模型的响应有显著影响时,才应该在模型中包含摩擦。如果在有摩擦的接触模拟中出现了收敛问题,首先应该尝试的诊断和修改问题的方法之一就是在无摩擦的情况下重新运算。一般情况下,ABAQUS/Explicit引入摩擦并不会引起附加的计算困难。
模拟理想的摩擦行为可能是非常困难的,因此在默认的大多数情况下,ABAQUS使用一个允许“弹性滑动”的罚摩擦公式,“弹性滑动”是在粘结的接触面之间所发生的小量的相对运动。ABAQUD自动地选择罚刚度,因此,这个允许的“弹性滑动”是单元特征长度的很小一部分。罚摩擦公式适用于大多数问题,包括在大部分金属成形问题中的应用。
必须包含理想的粘结-滑动摩擦行为的问题中,在ABAQUS/Standard中使用Lagrange摩擦公式,在ABAQUS/Explicit中使用动力学摩擦公式。在计算机资源的消耗上,Lagrange摩擦公式更加昂贵,因为对于每个采用摩擦接触的表面节点,ABAQUS/Standard应用附加的变量,求解速度也是更慢的,一般需要附加的迭代。
ABAQUS/Explicit中摩擦约束的动力学施加方法是基于预测/修正算法。在预测构形中,应用与节点相关的质量、节点滑动的距离和时间增量来计算用于保持另一侧表面上节点位置所需要的力。如果在节点上应用这个力计算得到的切应力大于$\tau_{crit}$,则表面是在滑动,并施加了一个相应于$\tau_{crit}$的力。在任何情况下,对于在处于接触中的从属节点与主控表面的节点上,这个力将导致沿表面切向的加速度修正。
在模型中由于包含了摩擦,所以在ABAQUS/Standard的求解方程中增加了非对称项,如果$\mu <0.2$,这些非对称项的量值和影响都非常小,并且正则、对称求解器工作效率很好(除非接触面具有很大的曲率)。对于更高的摩擦系数,将自动地采用非对称求解器,因此它将改进收敛的速度。非对称求解器所需的计算机内存和硬盘空间是对称求解器的2倍。大的$\mu$值通常不会在ABAQUS/Explicit中引起任何困难。
其他接触相互作用选项
在ABAQUS中的其他接触相互作用模型取决于分析程序和使用算法,可能包括粘性接触行为(contact adhesive behavior)、软接触行为(soften contact behavior)、扣紧(fasterner)(例如:电焊)和粘性接触阻尼(viscous contact damping)。
基于表面的约束
束缚(tie)约束:将两个面束缚在一起,在从属面上的每一个节点被约束为在主控面上距它最接近的点具有相同的运动。对于结构分析,这意味着约束了所有平移(也可以选择包括转动)自由度。
ABAQUS应用未变形的模型构型以确定哪些从属节点将被束缚到主控表面上。在默认情况下,束缚了位于主控表面上给定距离之内的所有从属节点,这个默认距离是基于主控表面上的典型单元尺度。可以通过两种方式使这个默认值失效:通过从被约束的主控表面上指定一个距离,并使从属节点位于其中;指定一个包括所有需要约束节点的节点集合。
也可以调整从属节点,使其刚好位于主控表面上。如果必须调整从属节点跨过一定的距离,而它是从属节点所附着的单元侧面上一大段长度,那么单元可能会严重扭曲,所以应尽可能避免大的调整。
在ABAQUS/Standard中定义接触
在ABAQUS/Standard中定义接触的步骤:创建表面——创建接触相互作用,使两个可能发生互相接触的表面成对——定义控制发生接触表面行为的力学性能模型
接触相互作用
每个接触相互作用必须赋予一种接触属性,在接触属性中,包含了本构关系,如摩擦和接触压力与空隙的关系。
当定义接触相互作用时,必须确定相对滑动的量级是小滑动还是有限滑动,默认的是更为普遍的有限滑动公式。如果两个表面之间的相对运动小于一个单元面上特征长度的一个小的比值,那么应用小滑动公式是合适的。在许可的条件下,使用小滑动公式可以提高分析的效率。
从属和主控表面
ABAQUS/Standard使用单纯主-从接触算法:在从属面上的节点不能侵入主控面的某一部分。该算法没有对主面做任何限制,主面可以在从面的节点之间侵入从面。
- 从面应该是网格划分更精细的表面
- 如果网格密度相近,从面应该取自采用较软材料的表面
小滑动与有限滑动
当应用小滑动公式时,ABAQUS/Standard在模拟开始时就建立了从面节点与主控表面之间的关系,确定了在主控表面上哪一段将与在从面上的每个节点发生相互作用。在整个分析过程中,都将保持这些关系,绝不会改变主面部分与从面节点的相互作用关系。如果在模型中包括了几何非线性,小滑动算法将考虑主面的任何转动和变形,并更新接触力传递的路径。如果在模型中没有考虑几何非线性,则忽略主面的任何转动和变形,载荷的路径保持不变。
有限滑动接触公式要求ABAQUS/Standard经常地确定与从面的每个节点发生接触的主面区域。这是一个相当复杂的计算,尤其是当两个接触物体都是变形体时。在这种模拟中的结构可以是二维的或者三维的。ABAQUS/Standard也可以模拟一个变形体的有限滑动自接触问题。
在变形体与刚性表面之间接触的有限滑动公式。不像两个变形体之间接触的有限滑动公式那么复杂。主面是刚性面的有限滑动模拟,可以应用在二维和三维的模型上。
单元选择
接触算法的关键在于确定作用于从面节点上的力。在ABAQUS/Standard中为接触分析选择单元时,一般来说,最好在那些将会构成从面的模型部分使用一阶单元。在模拟中,二阶单元有时可能会出现问题,原因是这些单元从常值压力计算等效节点载荷的方式。为避免问题的发生,在应用于定义从面的任何二阶、三维实体或楔型体的单元中,ABAQUS/Standard自动地增加了一个中面节点。对于常值压力作用下采用中面节点的二阶单元的面上的等效节点力具有相同的符号,尽管这些节点力的量值仍有很大的差异。
对于施加的压力,一阶单元的等效节点力的符号和量值总是保持一致性,因此,由给定节点力的分布所表示的接触状态不是模棱两可的。
如果几何形状是复杂的并需要利用自动网格生成器,应该使用在ABAQUS/Standard中的修正的二阶四面体单元(C3D10M),该单元是为了应用在复杂的接触模拟问题中而设计的,规则的二阶四面体单元(C3D10)在其角点处的接触力为零,导致很差的接触预测值。
接触算法
ABAQUS/Standard中的接触算法是围绕Newton-Raphson方法建立的,在每个增量步开始时检查所有接触相互作用的状态,以建立从属节点是开放还是闭合的。图中,$p$表示从属节点上的接触压力,$h$表示从属节点侵入主控表面的距离。如果一个节点是闭合的,ABAQUS/Standard需要确定它是处于滑动还是粘结。ABAQUS/Standard对每个闭合节点施加一个约束,而对那些改变接触状态从闭合到开放的任何节点接触约束。然后,ABAQUS/Standard进行迭代,并利用计算的修正值来更新模型的构形。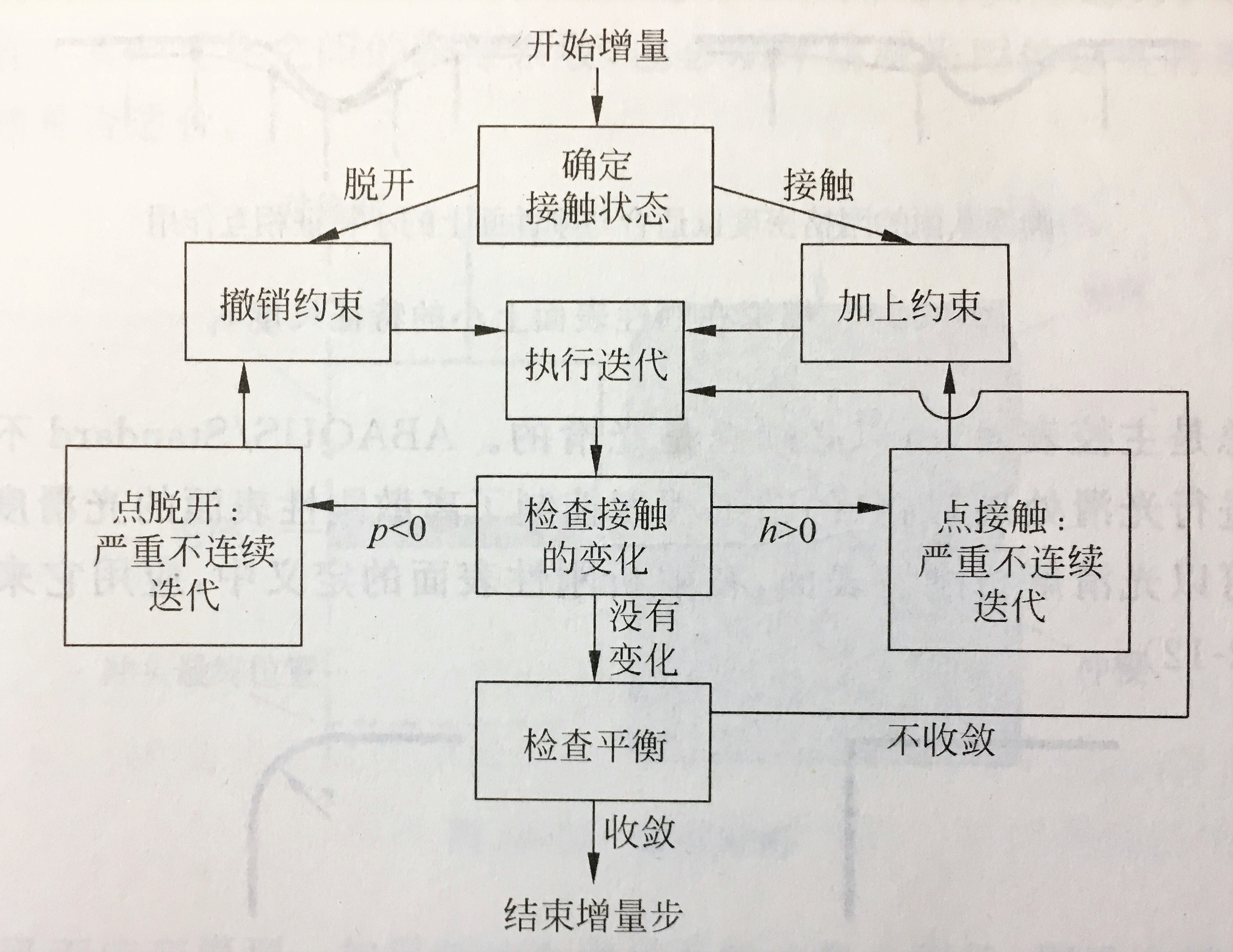
ABAQUS/Standard首先检验在从属节点上接触条件的变化,如果在当前迭代步中检测到任何接触变化,ABAQUS/Standard将标识其为严重不连续迭代(severe discontinuity iteration),并不再进行力或力矩的平衡检验。在第1次迭代后,ABAQUS/Standard修正接触约束以反映接触状态的变化,并试图进行第2次迭代,重复此过程,直到完成迭代并且不改变接触状态。
对于每个完成的增量步,在信息文件和状态文件中的总结将显示出有多少次迭代是严重不连续迭代和多少次是平衡迭代。对于每个增量步,其总的迭代数目是这两者之和。如果严重不连续迭代的数目很多,并只有很少的平衡迭代,那么ABAQUS/Standard难以确定合适的接触状态。对于任何需要严重不连续迭代超过12次的增量步,ABAQUS/Standard会默认放弃,而应用更小的增量尺度再次进行增量步计算。如果没有严重不连续迭代,从一个增量步到下一个增量步的接触状态不会发生改变。
在ABAQUS/Standard中的刚性表面模拟问题
在ABAQUS/Standard中模拟包含刚性表面的接触时,必须考虑的几个问题:
- 在接触相互作用中,刚性表面总是主控表面。
- 刚性表面必须足够大,以保证从属节点不会滑出该表面和落到其背面(fall behind)。如果这种情况发生,解答通常是不收敛的。延展刚性表面或包含沿周边的角点可防止从属节点落到主控表面的背面。
- 为了与刚性表面的任何特征相互作用,变形体的网格要划分得足够精细,防止刚性特征尺度侵入变形的表面。
- 在ABAQUS/Standard中的接触算法要求接触相互作用的主控表面光滑,所以刚性表面必须总是光滑的。ABAQUS/Standard不会对离散的刚性表面进行光滑处理,划分的精细程度控制了离散刚性表面的光滑度。通过定义倒角半径可以光滑解析刚性表面,光滑任意尖角。
- 刚性表面的法向必须总是指向将与其发生作用的变形表面,否则,ABAQUS/Standard将在变形表面上的所有节点检验是否发生了严重的过盈(overclosure),模拟将可能由于收敛困难而中断。
当创建表面时,通过定义面定义由刚性单元创建的刚性表面的法向。